Введение в ROS (операционная система роботов)
Операционная система роботов или просто ROS - это платформа, которая используется сотнями компаний и технических специалистов в различных областях по всему миру в области робототехники и автоматизации. Он обеспечивает безболезненную отправную точку для непрофессионалов в области программирования роботов.
Итак, прежде всего, что такое робот?
Робот - это любая система, которая может воспринимать окружающую среду, которая является его окружением, принимать решения на основе состояния окружающей среды и может выполнять сгенерированные инструкции.
ОС и РОС?
Операционная система - это программное обеспечение, которое обеспечивает интерфейс между приложениями и оборудованием. Он занимается распределением ресурсов, таких как память, время процессора и т. Д., С помощью алгоритмов планирования и ведет учет полномочий различных пользователей, обеспечивая таким образом уровень безопасности. Он почти всегда имеет низкоуровневую программу, называемую ядром, которая помогает взаимодействовать с оборудованием и является, по сути, самой важной частью любой операционной системы.
ROS - это не операционная система, а мета-операционная система, что означает, что она предполагает наличие базовой операционной системы, которая поможет ей в выполнении своих задач.
ROS и соответствующая операционная система -
ROS зависит от базовой операционной системы. ROS требует от операционной системы большой функциональности. Вдобавок к этому ROS должны быть бесплатно доступны для большой части населения, в противном случае большая часть населения не сможет получить к ней доступ. Популярность ROS во многом обусловлена ее открытым характером и легкой доступностью для массового населения. Ему также нужна операционная система с открытым исходным кодом, поэтому операционная система и ROS могут быть изменены в соответствии с требованиями приложения.
Проприетарные операционные системы, такие как Windows 10 и Mac OS X, могут накладывать определенные ограничения на то, как мы можем их использовать. Это может привести к жесткости процесса разработки, что не будет идеальным для такого отраслевого стандарта, как ROS. Следовательно, большинство людей предпочитают запускать ROS в Linux, особенно в Debian и Ubuntu, поскольку ROS очень хорошо поддерживает операционные системы на основе Debian, особенно Ubuntu. Это не означает, что ROS нельзя запускать с Mac OS X или Windows 10, если на то пошло. Но поддержка ограничена, и люди могут оказаться в сложной ситуации без небольшой помощи со стороны сообщества.
Между ROS и ОС существует такая близость, что становится почти необходимым знать больше об операционной системе для работы с ROS. Использование Linux в качестве новичка может быть проблемой. Один из них обязательно столкнется с проблемами с Linux, особенно при работе с ROS, и хорошее знание Linux поможет предотвратить / исправить эти проблемы.
- Мета-операционная система обладает огромным набором функциональных возможностей, настолько обширным, что ее нельзя классифицировать как фреймворк или кластер библиотек, но не настолько, чтобы ее можно было отнести к категории операционных систем. Он обеспечивает функциональные возможности как операционных систем, так и фреймворков, но не полностью, поэтому его нельзя классифицировать ни как, например, он не предоставляет основные функции, которые должна обеспечивать операционная система, но предоставляет API.
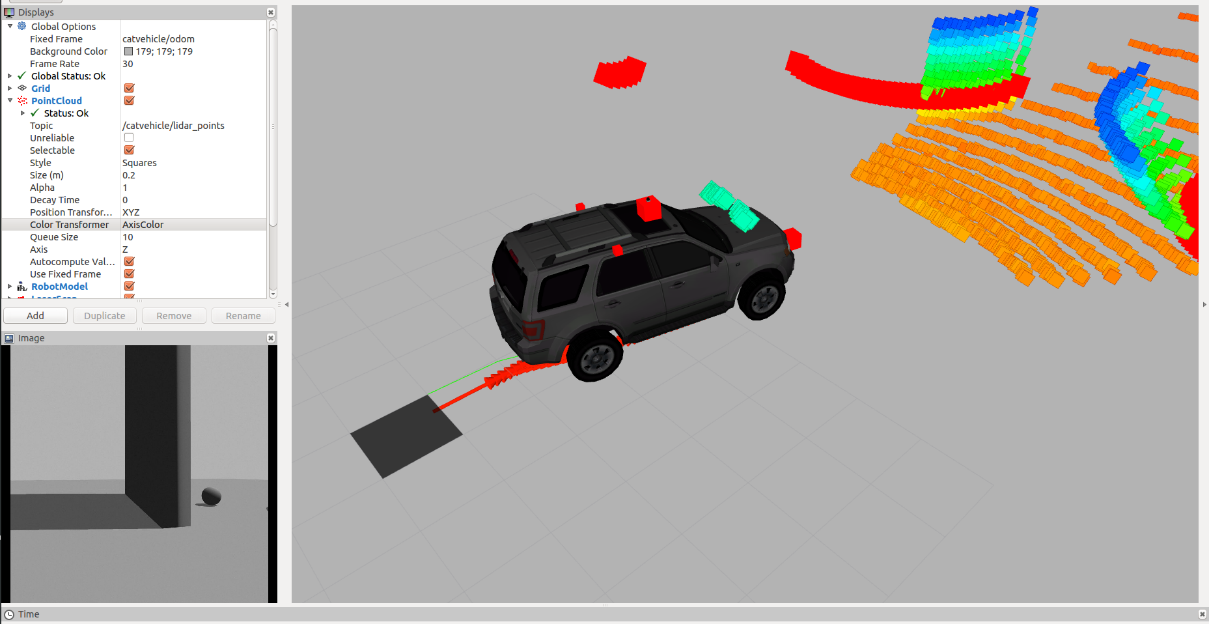
- RViz - это инструмент трехмерной визуализации для ROS. Это один из самых популярных инструментов для визуализации. Он принимает тему в качестве входных данных и визуализирует ее в зависимости от типа публикуемого сообщения. Это позволяет нам увидеть окружающую среду с точки зрения робота.
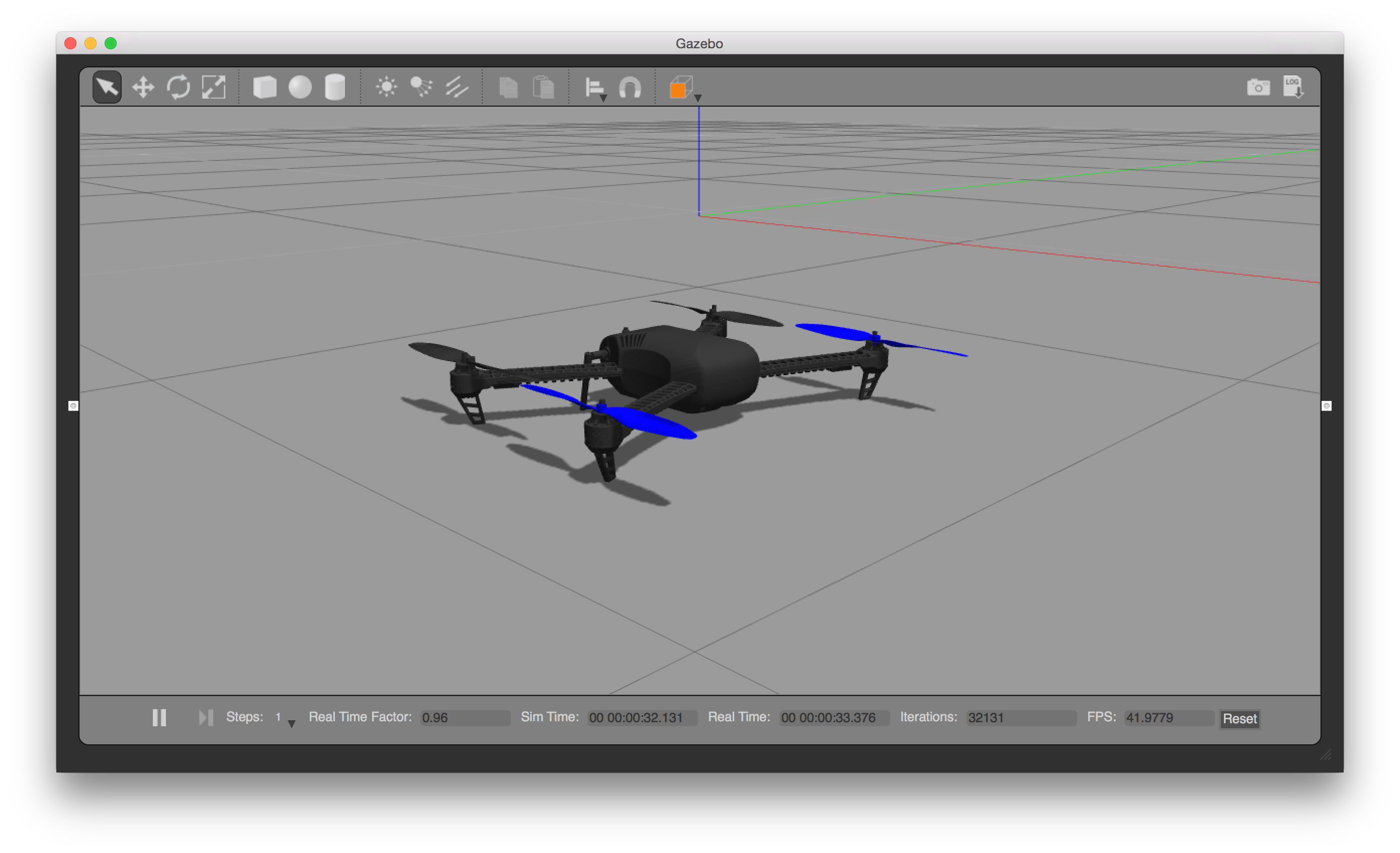
Когда весь код будет готов и запущен, нам нужно протестировать его, чтобы при необходимости внести изменения. Выполнение этого на реальном роботе будет дорогостоящим и может привести к потере времени на настройку робота каждый раз. Поэтому для этого мы используем роботизированное моделирование. Самый популярный симулятор работы с ROS - Gazebo . У него хорошая поддержка сообщества, у него открытый исходный код, и на нем проще развертывать роботов.
ROS предназначалась для конкретных случаев использования. С тех пор многое изменилось. Мы стали свидетелями возрождения исследований в области искусственного интеллекта и увеличения количества вариантов использования. Робототехника становится все более популярной среди масс, и хотя ROS очень хорошо справляется с этими задачами (хотя и не была создана), она требует большого количества хаков.