Система нечеткой логики
Вступление:
Управление нечеткой логикой (FLC) является наиболее активной областью исследований в области применения теории нечетких множеств, нечетких рассуждений и нечеткой логики. Применение FLC простирается от управления производственными процессами до биомедицинских приборов и ценных бумаг. По сравнению с традиционными методами управления, FLC лучше всего использовался в сложных плохо определенных задачах, которыми может управлять эффективный человек-оператор, не зная об их основной динамике.
Система управления - это набор физических компонентов, предназначенных для изменения другой физической системы, чтобы эта система проявляла определенные желаемые характеристики. Существует два типа систем управления: системы управления с обратной связью и системы управления с обратной связью. В системах управления без обратной связи действие управления входом не зависит от выхода физической системы. С другой стороны, в системе управления с обратной связью действие управления входом зависит от выхода физической системы. Системы управления с замкнутым контуром также известны как системы управления с обратной связью. Первый шаг к контролю любой физической переменной - это ее измерение. Датчик измеряет контролируемый сигнал. Завод - это физическая система, находящаяся под контролем. В системе управления с обратной связью форсирующие сигналы входов системы определяются выходными характеристиками системы. Основная задача управления задается следующим образом:
Выход контролируемой физической системы регулируется с помощью сигнала ошибки. Разница между фактическим (рассчитанным) откликом płant и желаемым откликом дает сигнал ошибки. Для получения удовлетворительных откликов и характеристик системы управления с обратной связью к контуру может быть добавлена дополнительная система, называемая компенсатором или контроллером. Базовая блок-схема замкнутой системы управления показана на рисунке 1. Нечеткие правила управления в основном являются правилами IE-THEN.
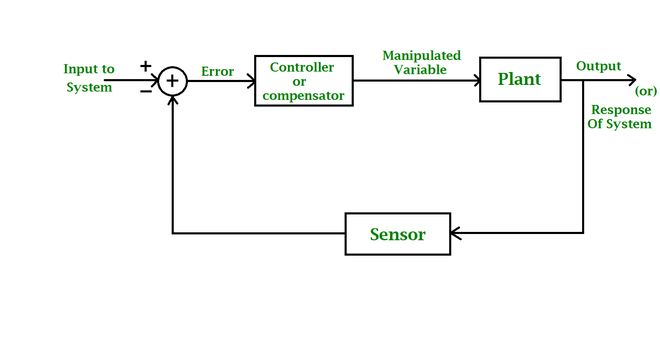
Рис.1: Блок-схема замкнутой системы управления
Дизайн системы управления:
Проектирование контроллера для сложной физической системы включает следующие шаги:
- Разложение крупномасштабной системы на набор различных подсистем.
- Медленное изменение динамики объекта и линеаризация нелинейной динамики плоскости относительно набора рабочих точек.
- Организация набора переменных состояния, управляющих переменных или выходных характеристик для рассматриваемой системы.
- 4. Проектирование простых P, PD, PID контроллеров для подсистем. Также могут быть разработаны оптимальные контроллеры.
Помимо первых четырех шагов, могут возникать неопределенности из-за внешних условий окружающей среды. Конструкция контроллера должна быть максимально приближена к оптимальной конструкции контроллера на основе экспертных знаний инженера по контролю. Это может быть сделано путем различных численных наблюдений за взаимосвязью ввода-вывода в форме лингвистической, интуитивной и других видов связанной информации, связанной с динамикой растения и внешней средой. Наконец, система диспетчерского управления, ручная или автоматическая, образует дополнительный контур управления с обратной связью для настройки и регулировки параметров контроллера для компенсации вариационных эффектов, вызванных нелинейной и реконструированной динамикой. По сравнению с традиционной конструкцией системы управления, при ее выборе при проектировании системы FLC должны быть сделаны следующие допущения. Рассматриваемый объект должен быть наблюдаемым и управляемым. Широкий спектр знаний, включающий набор экспертных лингвистических правил, базовый инженерный здравый смысл, набор данных для ввода / вывода или аналитическую модель контроллера, которая может быть нечеткой и на основе которой нечеткое правило может быть сформировано, должен существовать. Кроме того, для рассматриваемой проблемы должно существовать решение, и оно должно быть таким, чтобы инженер по управлению работал над «хорошим» решением, а не особо искал оптимальное решение. Контроллер в этом случае должен быть спроектирован с учетом наших возможностей и с допустимым диапазоном точности. Следует отметить, что проблемы стабильности и оптимальности являются постоянными проблемами в конструкции нечеткого контроллера.
При разработке контроллера с нечеткой логикой процесс формирования нечетких правил играет жизненно важную роль. Существует четыре структуры системы правил нечеткого производства (Weiss and Donnel, 1979), а именно:
- Набор правил, который представляет политику и эвристические стратегии эксперта, принимающего решения.
- Набор входных данных, которые оцениваются непосредственно перед фактическим решением.
- Метод оценки любого предлагаемого действия с точки зрения его соответствия установленным правилам при наличии данных.
- Метод создания многообещающих действий и определения, когда прекратить поиск лучших.
Все необходимые параметры, используемые в контроллере нечеткой логики, определяются функциями принадлежности. Правила оцениваются с использованием таких методов, как приблизительное рассуждение или интерполяционное рассуждение. Эти четыре структуры нечетких правил помогают получить контрольную поверхность, которая связывает управляющее действие с измеряемым состоянием или выходной переменной. Затем контрольная поверхность может быть отобрана до конечного числа точек, и на основе этой информации может быть построена справочная таблица. Таблица поиска содержит информацию о поверхности управления, которая может быть загружена в микросхему памяти только для чтения. Этот чип будет представлять собой фиксированный контроллер для завода.
Архитектура и работа системы FLC:
Базовая архитектура контроллера нечеткой логики показана на рисунке 2. Основными компонентами системы FLC являются фаззификатор, нечеткая база правил, нечеткая база знаний, механизм вывода и defuzz.ifier. Он также включает параметры для нормализации. Когда выходной сигнал дефаззификатора не является управляющим действием для объекта, тогда система представляет собой систему принятия решений с нечеткой логикой. Присутствующий фаззификатор преобразует четкие количества в нечеткие. В нечеткой базе правил хранятся знания о работе процесса экспертизы предметной области. В нечеткой базе знаний хранятся знания обо всех нечетких отношениях ввода-вывода. Он включает в себя функции принадлежности, определяющие входные переменные в базу нечетких правил и выходные переменные для объекта, находящегося под контролем. Механизм вывода является ядром системы FLC, и он обладает способностью моделировать человеческие решения, выполняя приблизительные рассуждения для достижения желаемой стратегии управления. Дефаззификатор преобразует нечеткие величины в четкие величины на основе предполагаемого нечеткого управляющего воздействия механизма логического вывода.

Рис 2: Базовая архитектура системы FLC
Различные этапы проектирования контроллера нечеткой логики заключаются в следующем:
- Шаг 1. Найдите переменные входа, выхода и состояния рассматриваемой плоскости. я
- Шаг 2: Разделите всю совокупность дискурса, охватываемого каждой переменной, на несколько нечетких подмножеств, присвоив каждому лингвистическую метку. Подмножества включают все элементы вселенной.
- Шаг 3. Получите функцию принадлежности для каждого нечеткого подмножества.
- Шаг 4: Назначьте нечеткие отношения между входами или состояниями нечетких подмножеств с одной стороны и выходными данными нечетких подмножеств с другой стороны, тем самым формируя базу правил.
- Шаг 5: Выберите подходящие коэффициенты масштабирования для входных и выходных переменных для нормализации переменных между интервалом [0, 1] и [-1, I].
- Шаг 6: Проведите фаззификацию.
- Шаг 7: Определите результат, вносимый каждым правилом, используя нечеткие приблизительные рассуждения.
- Шаг 8: Объедините нечеткие выходные данные, полученные из каждого правила.
- Шаг 9: Наконец, примените дефаззификацию, чтобы получить четкий результат.
Вышеупомянутые шаги выполняются и выполняются для простой системы FLC. Следующие элементы конструкции приняты для проектирования общей системы FLC:
- Стратегии фаззификации и интерпретация фаззификатора.
- Нечеткая база знаний: нормализация задействованных параметров; разделение входных и выходных пространств; выбор функций принадлежности первичного нечеткого множества.
- База нечетких правил: выбор входных и выходных переменных; источник, из которого должны быть получены правила нечеткого управления; типы нечетких правил управления; полнота нечетких правил управления.
- Логика принятия решений: правильное определение нечеткого вывода; толкование соединительного слова «и»; толкование соединительного слова «или»; Механизм логического вывода.
- Материалы дефаззификации и интерпретация дефаззификатора.
Приложения:
Системы FLC находят широкое применение в различных промышленных и коммерческих продуктах и системах. В нескольких приложениях, связанных с нелинейными, изменяющимися во времени, плохо определенными системами, а также сложными системами, системы FLC оказались очень эффективными по сравнению с другими традиционными системами управления. Области применения систем FLC:
- Управление трафиком
- Паровой двигатель
- Управление полетом самолета
- Управление ракетами
- Адаптивное управление
- Контроль уровня жидкости
- Модель вертолета
- Автомобильный регулятор скорости
- Контроллер тормозной системы
- Управление процессом (включая управление цементной печью)
- Роботизированный контроль
- Управление лифтом (автоматическим лифтом);
- Автоматическое управление ходом
- Управление холодильной установкой
- Очистка воды
- Управление котлом;
- Управление ядерными реакторами;
- Управление энергосистемами;
- Управление кондиционером (регулятор температуры)
- Биологические процессы
- Система, основанная на знаниях
- Блок управления обнаружением неисправностей
- Нечеткая аппаратная реализация и нечеткие компьютеры