Проблема самого широкого пути | Практическое применение алгоритма Дейкстры
Настоятельно рекомендуется сначала прочитать алгоритм Дейкстры, используя приоритетную очередь.
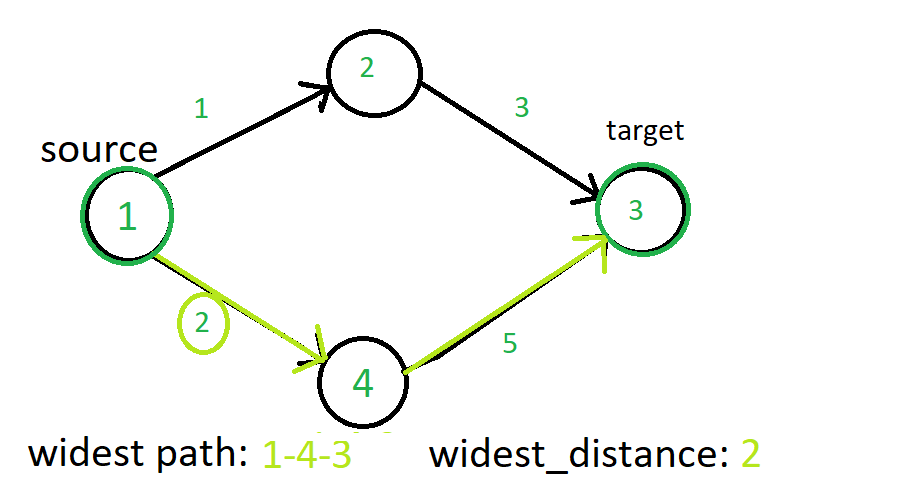
Проблема самого широкого пути - это проблема поиска пути между двумя вершинами графа, максимизирующего вес ребра с минимальным весом в пути . См. Изображение ниже, чтобы понять проблему:
Пример практического применения:
Эта проблема является известным вариантом алгоритма Дейкстры. В практическом применении эту проблему можно рассматривать как граф с маршрутизаторами, поскольку его вершины и ребра представляют собой полосу пропускания между двумя вершинами. Теперь, если мы хотим найти путь с максимальной пропускной способностью между двумя точками подключения к Интернету, эту проблему можно решить с помощью этого алгоритма.
Как решить эту проблему?
Мы собираемся решить эту проблему, используя реализацию алгоритма Дейкстры с очередью приоритетов ((| E | + | V |) log | V |) с небольшими изменениями.
Мы решаем эту проблему, просто заменяя условие релаксации в алгоритме Дейкстры на:
max(min(widest_dist[u], weight(u, v)), widest_dist[v])
где u - исходная вершина для v. v - текущая вершина, в которой мы проверяем условие.
Этот алгоритм работает как для ориентированного, так и для неориентированного графа.
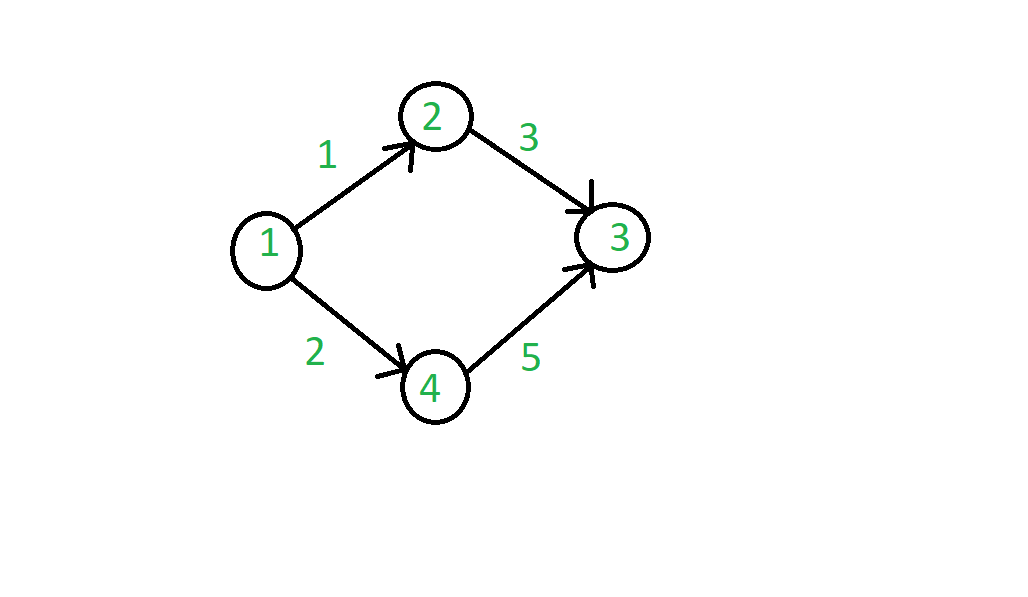
Посмотрите серию изображений ниже, чтобы получить представление о проблеме и алгоритме:
Значения по краям представляют собой веса направленных краев.
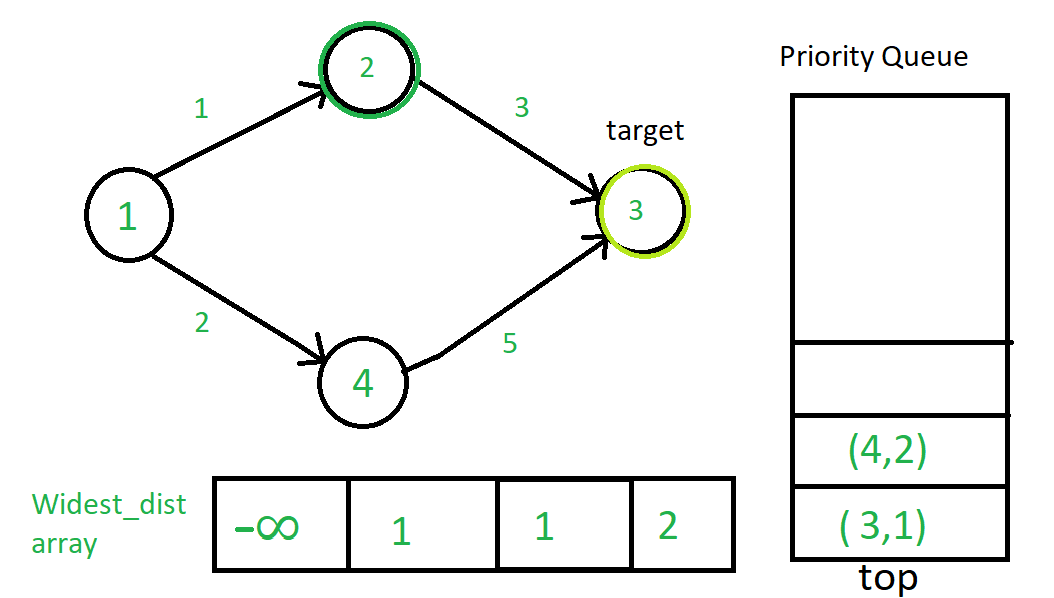
Мы начнем с исходной вершины, а затем проедем все вершины, соединенные с ней, и добавим приоритетную очередь в соответствии с условием релаксации.
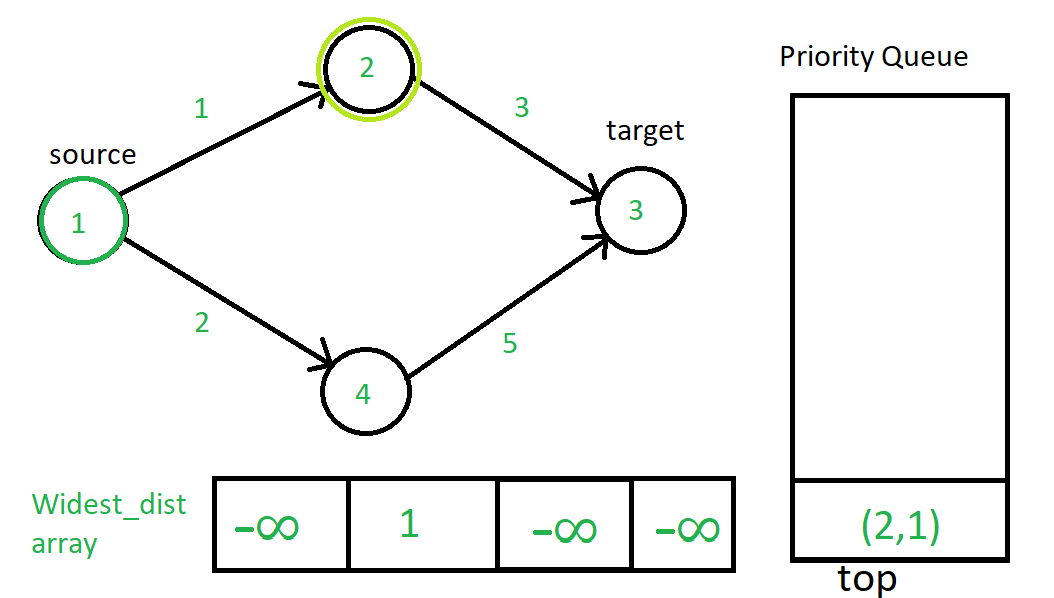
Теперь (2, 1) появится, и 2 будет текущей исходной вершиной.
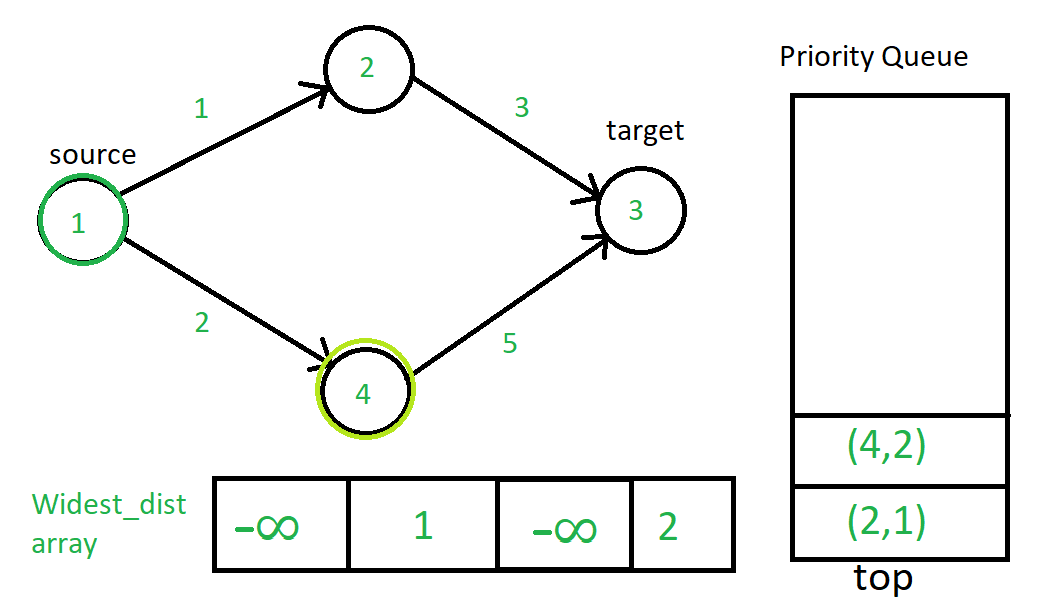
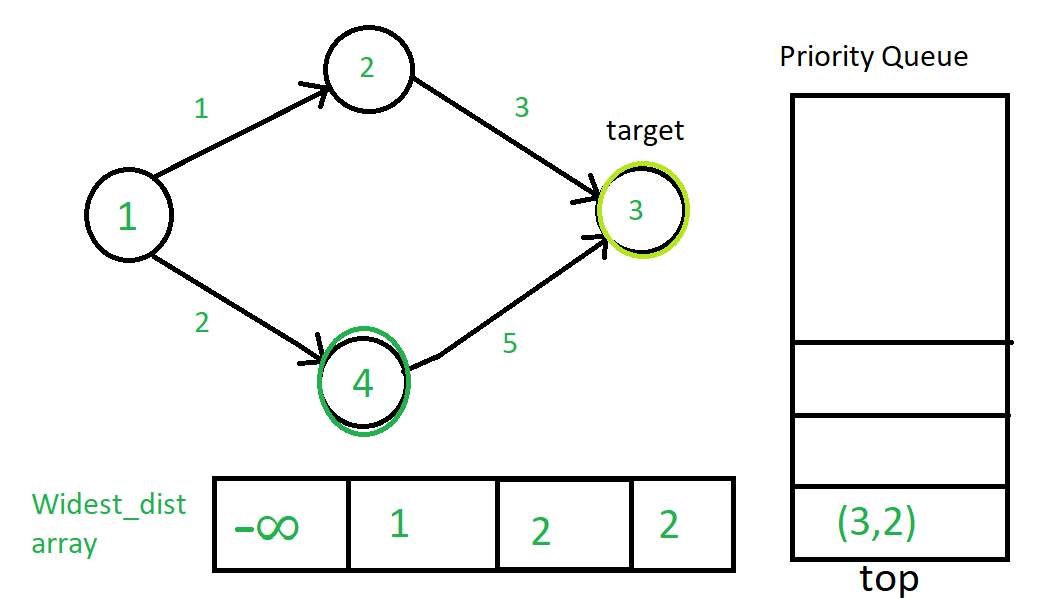
Теперь (3, 1) выскочит из очереди. Но поскольку 3 не имеет связной вершины через направленное ребро, ничего не произойдет. Итак, (4, 2) появится следующим.
Наконец, алгоритм останавливается, поскольку в очереди с приоритетами больше нет элементов.
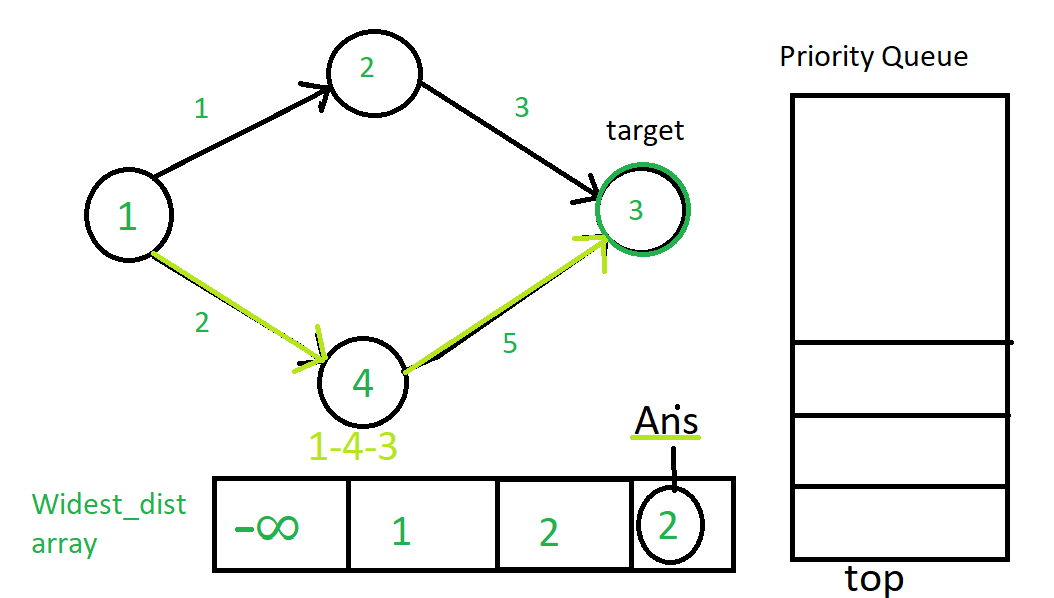
The path with the maximum value of widest distance is 1-4-3 which has the maximum bottle-neck value of 2. So we end up getting widest distance of 2 to reach the target vertex 3.
Below is the implementation of the above approach:
CPP
// C++ implementation of the approach#include <bits/stdc++.h>using namespace std;// Function to print the required pathvoid printpath(vector<int>& parent, int vertex, int target){ if (vertex == 0) { return; } printpath(parent, parent[vertex], target); cout << vertex << (vertex == target ? "
" : "--");}// Function to return the maximum weight// in the widest path of the given graphint widest_path_problem(vector<vector<pair<int, int> > >& Graph, int src, int target){ // To keep track of widest distance vector<int> widest(Graph.size(), INT_MIN); // To get the path at the end of the algorithm vector<int> parent(Graph.size(), 0); // Use of Minimum Priority Queue to keep track minimum // widest distance vertex so far in the algorithm priority_queue<pair<int, int>, vector<pair<int, int> >, greater<pair<int, int> > > container; container.push(make_pair(0, src)); widest[src] = INT_MAX; while (container.empty() == false) { pair<int, int> temp = container.top(); int current_src = temp.second; container.pop(); for (auto vertex : Graph[current_src]) { // Finding the widest distance to the vertex // using current_source vertex"s widest distance // and its widest distance so far int distance = max(widest[vertex.second], min(widest[current_src], vertex.first)); // Relaxation of edge and adding into Priority Queue if (distance > widest[vertex.second]) { // Updating bottle-neck distance widest[vertex.second] = distance; // To keep track of parent parent[vertex.second] = current_src; // Adding the relaxed edge in the prority queue container.push(make_pair(distance, vertex.second)); } } } printpath(parent, target, target); return widest[target];}// Driver codeint main(){ // Graph representation vector<vector<pair<int, int> > > graph; int no_vertices = 4; graph.assign(no_vertices + 1, vector<pair<int, int> >()); // Adding edges to graph // Resulting graph // 1--2 // | | // 4--3 // Note that order in pair is (distance, vertex) graph[1].push_back(make_pair(1, 2)); graph[1].push_back(make_pair(2, 4)); graph[2].push_back(make_pair(3, 3)); graph[4].push_back(make_pair(5, 3)); cout << widest_path_problem(graph, 1, 3); return 0;} |
Python3
# Python3 implementation of the approach# Function to prthe required pathdef printpath(parent, vertex, target): # global parent if (vertex == 0): return printpath(parent, parent[vertex], target) print(vertex ,end="
" if (vertex == target) else "--")# Function to return the maximum weight# in the widest path of the given graphdef widest_path_problem(Graph, src, target): # To keep track of widest distance widest = [-10**9]*(len(Graph)) # To get the path at the end of the algorithm parent = [0]*len(Graph) # Use of Minimum Priority Queue to keep track minimum # widest distance vertex so far in the algorithm container = [] container.append((0, src)) widest[src] = 10**9 container = sorted(container) while (len(container)>0): temp = container[-1] current_src = temp[1] del container[-1] for vertex in Graph[current_src]: # Finding the widest distance to the vertex # using current_source vertex"s widest distance # and its widest distance so far distance = max(widest[vertex[1]], min(widest[current_src], vertex[0])) # Relaxation of edge and adding into Priority Queue if (distance > widest[vertex[1]]): # Updating bottle-neck distance widest[vertex[1]] = distance # To keep track of parent parent[vertex[1]] = current_src # Adding the relaxed edge in the prority queue container.append((distance, vertex[1])) container = sorted(container) printpath(parent, target, target) return widest[target]# Driver codeif __name__ == "__main__": # Graph representation graph = [[] for i in range(5)] no_vertices = 4 # Adding edges to graph # Resulting graph #1--2 #| | #4--3 # Note that order in pair is (distance, vertex) graph[1].append((1, 2)) graph[1].append((2, 4)) graph[2].append((3, 3)) graph[4].append((5, 3)) print(widest_path_problem(graph, 1, 3))# This code is contributed by mohit kumar 29 |
1--4--3 2
Вниманию читателя! Не прекращайте учиться сейчас. Освойте все важные концепции DSA с помощью самостоятельного курса DSA по приемлемой для студентов цене и будьте готовы к работе в отрасли. Чтобы завершить подготовку от изучения языка к DS Algo и многому другому, см. Полный курс подготовки к собеседованию .
Если вы хотите посещать живые занятия с отраслевыми экспертами, пожалуйста, обращайтесь к Geeks Classes Live и Geeks Classes Live USA.